HKPS 首塊RISC-V開發板規格
Category :
Home
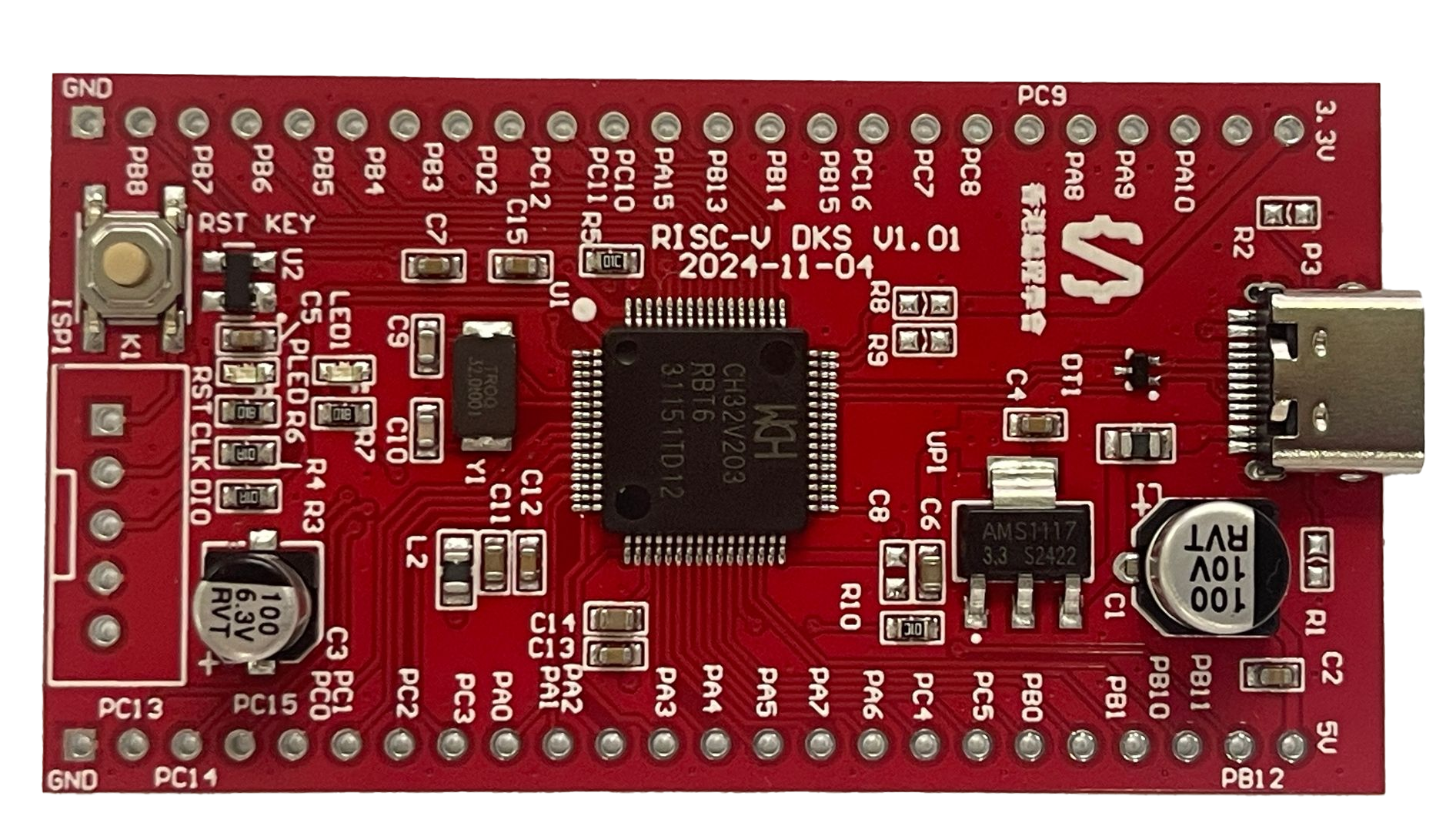
MCU : CH32V203
CH32V203系列是基於32位元RISC-V核心設計的工業級增強型通用微控制器,高效能,最高支援144MHz系統主頻,運作功耗低至49.3uA/MHz。機等豐富的周邊資源,同時提供TSSOP20、QFN28、QFN48X7、LQFP32、LQFP48等多種封裝供客戶彈性選擇。
系統模組
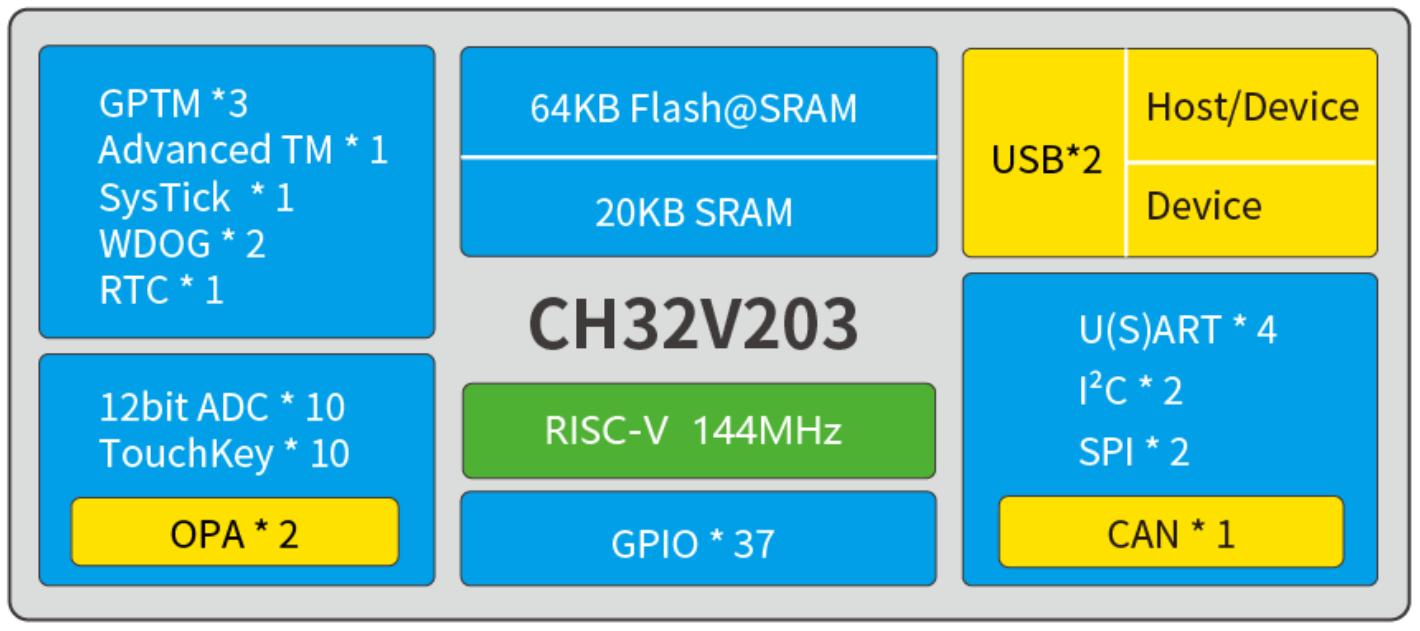
- 青稞V4B,最高144MHz系統主頻
- 支援單週期乘法和硬體除法
- 20KB靜態RAM,64KB快閃記憶體
- 供電電壓:2.5/3.3V,GPIO單元獨立供電
- 摘要模式:睡眠、停止、待機
- 運轉模式低至49.3uA/MHz
- 睡眠模式低至19.4uA/MHz
- 上/下電重設、可程式電壓監測器
- 1組8路通用DMA控制器
- 2組試驗器
- 10頻道12位元ADC轉換,10路觸控按鍵TouchKey
- 4 小組
- 1個USB2.0全速主機/設備接口
- 1個USB2.0全速設備接口
- 4個串口
- 1個CAN介面(2.0B主動)
- 2組IIC介面、2組SPI接口
- 37個I/O口,可以贏得16外部中斷
- CRC運算單元,96位元晶片唯一ID
- 串行2線調試接口
- 封裝形式:TSSOP20、QFN28、QFN48X7、LQFP32、LQFP48
開發資料
1、資料手冊:CH32V203DS0.PDF,CH32FV2x_V3xRM.PDF
2、CH32V203評估板說明及參考應用範例:CH32V20xEVT.ZIP
3、整合開發環境(IDE):MounRiver Studio(MRS)
相關資料
https://www.wch.cn/products/CH32V203.html
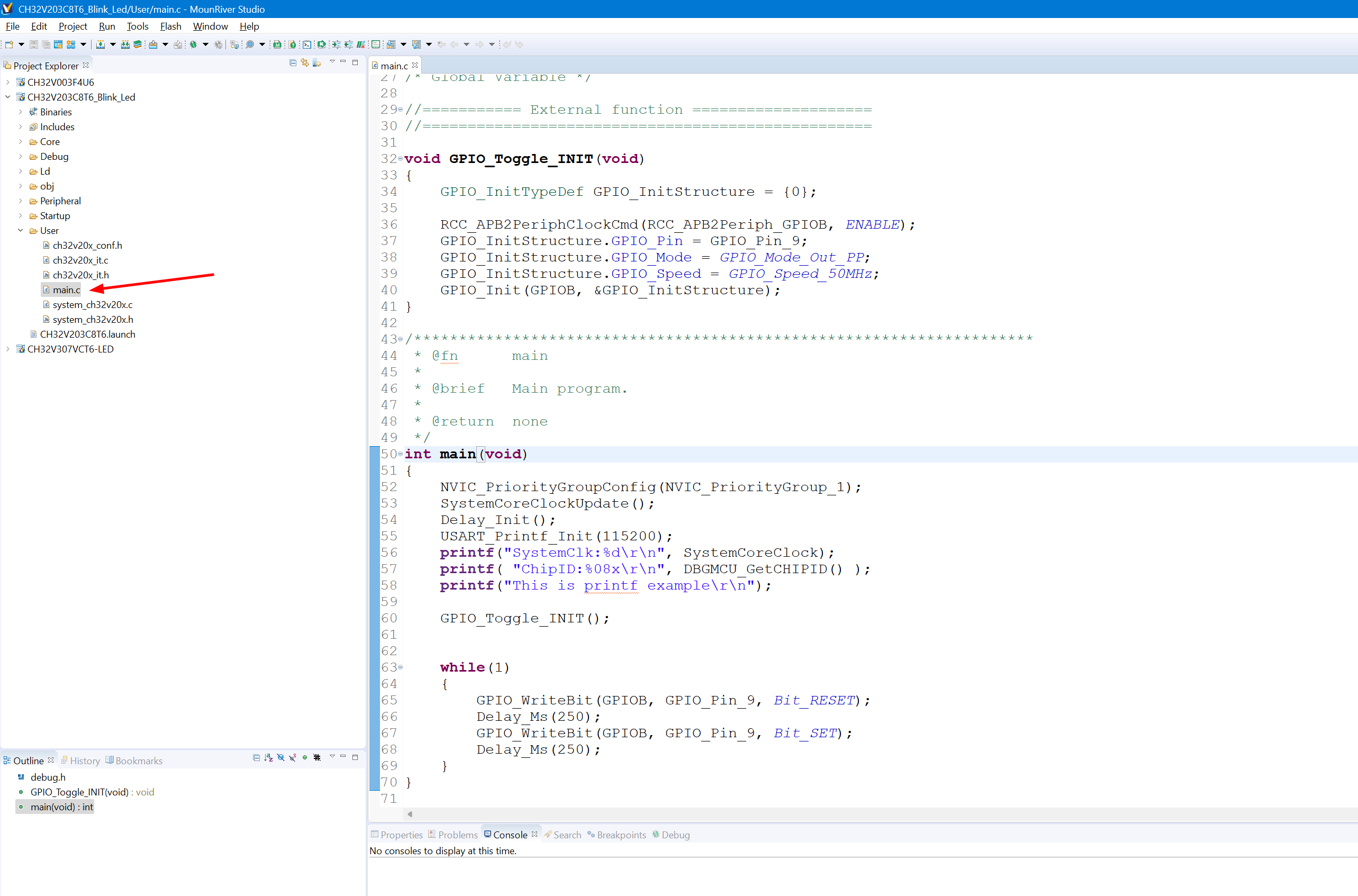
實驗代碼
/********************************** (C) COPYRIGHT *******************************
* File Name : main.c
* Author : WCH
* Version : V1.0.0
* Date : 2021/06/06
* Description : Main program body.
*********************************************************************************
* Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd.
* Attention: This software (modified or not) and binary are used for
* microcontroller manufactured by Nanjing Qinheng Microelectronics.
*******************************************************************************/
/*
*@Note
*USART Print debugging routine:
*USART1_Tx(PA9).
*This example demonstrates using USART1(PA9) as a print debug port output.
*
*/
#include "debug.h"
/* Global typedef */
/* Global define */
/* Global Variable */
//=========== External function ====================
//==================================================
void GPIO_Toggle_INIT(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(115200);
printf("SystemClk:%d\r\n", SystemCoreClock);
printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
printf("This is printf example\r\n");
GPIO_Toggle_INIT();
while(1)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_9, Bit_RESET);
Delay_Ms(250);
GPIO_WriteBit(GPIOB, GPIO_Pin_9, Bit_SET);
Delay_Ms(250);
}
}